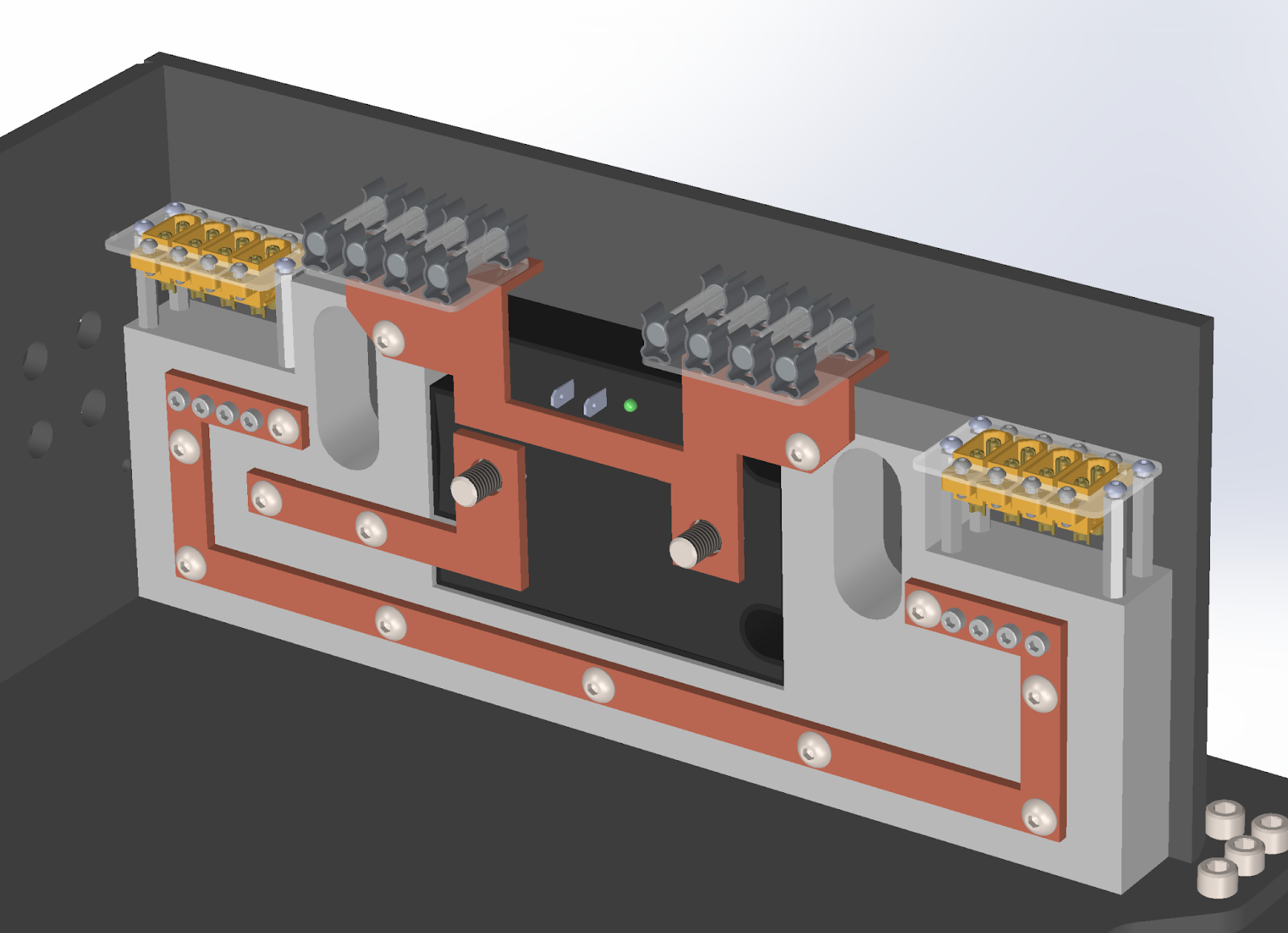
Mechanical
The mechanical component of power distribution is responsible for getting power to the thrusters. It consists of a solid-state relay, copper bus bars, and a bank of eight separate fuses. Having separate fuses for each thruster allows the robot to continue functioning on its remaining thrusters if a fuse is blown.
Electrical
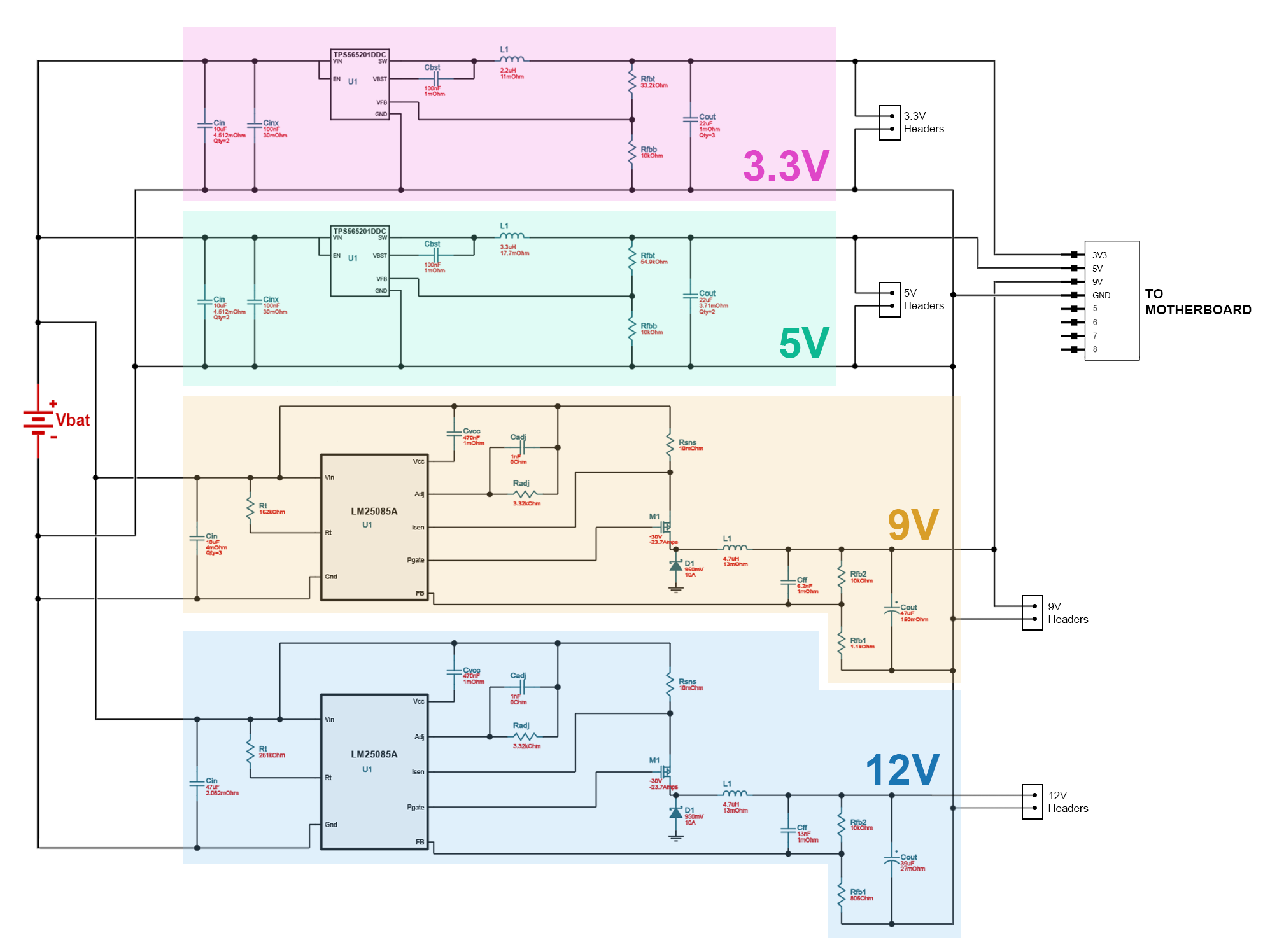
The PCB component of the power distribution subsystem supplies power to the robot motherboard, as well as various sensors and actuators. Because our electrical components operate on different voltages (none of which are the battery voltage), we use a circuit board to shift the battery voltage down to a set of commonly used voltages, namely: 3.3V, 5V, 9V, 12V. Some of these are fed to the motherboard, and all of the voltages are routed to a set of connectors so that various components can be added to the robot and directly powered from the power distribution board.