Loading...
SLAM
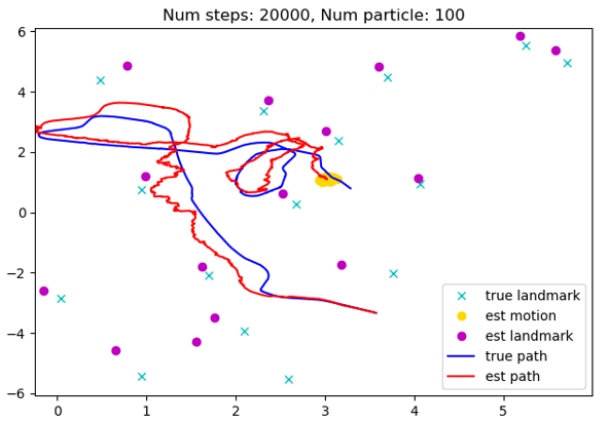
The simultaneous localization and mapping (SLAM) team aims to estimate the position of the robot relative to obstacles and vice versa using sensor measurements and detections from the vision subsystem. This is particularly challenging in the RoboSub competition because of the large distances between obstacles and the difficulty of applying vision algorithms underwater. The SLAM subsystem's estimates can then be used by the navigation subsystem to plan a path between obstacles.